Company Background
Civil Maps is a San Francisco based start-up that provides a scalable, edge-based HD mapping and localization platform that helps automotive OEMs, map providers, and mobility companies accelerate their autonomous driving programs. With their Edge MappingTM technology, Civil Maps is redefining traditional map creation workflows and enabling continental-scale base map crowdsourcing. Civil Maps’ resources are augmented through its partnerships with leading geospatial, governmental and academic institutions such as the U.S. Department of Energy, National Energy Research Scientific Computing Center, Verizon Innovation Program, University of California Berkeley, and Stanford University.
The Transformative Solution
Civil Maps approached Tech Vedika to build a solution that would provide real-time, localization in six dimensions and producing augmented reality maps to be used by autonomous vehicles and humans.
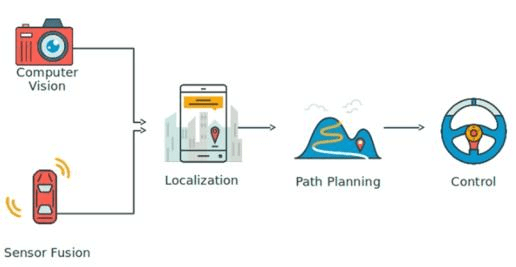
Autonomous driving is the highest level of automation for a vehicle, which means the vehicle can drive itself from a starting point to a destination with no human intervention. The problem can be divided into two separate tasks. The first task is focused on keeping the vehicle moving along a correct path. The second task is the capability to perceive and react to unpredictable dynamic obstacles, like other vehicles, pedestrians, and traffic signalization. Tech Vedika developed a solution with the following self-driving car components:
1. Computer Vision & Machine Learning
2. Sensor fusion
3. Localization
The computer vision and machine learning module are used to perform the following basic operations from the images captured by the camera:
- Detect dynamic objects like vehicles and pedestrians
- Detect the distance to the object and obstacles
- Detect traffic symbols and signals
- Recognize the traffic symbol information and Signals
- Perform localization
An autonomous vehicle must be equipped with a set of sensors that allows it to accurately determine its position relative to the road limits. The lateral deviation is the most critical since it must be in the order of few centimeters. To achieve the stringent level of accuracy, integrity, and availability, required for autonomous driving applications, Tech Vedika used 3D LASER scanners (LIDAR) and cameras. Computer vision and optimization modules are used to compute the changing pose of the camera with respect to LIDAR and the GPU & IMU unit.
The Results
Tech Vedika developed an advanced vehicular cognition system that provides centimeter-accurate Localization in six degrees of freedom.
Innovation
- Very accurate and fast dynamic pose estimation of the camera(translation and orientation) with respect to LIDAR.
- Very accurate and fast dynamic pose estimation of the LIDAR unit (translation and orientation) with respect to the GPU & IMUunit.
- Detection of pedestrians and vehicles.
- LIDAR based object detection of 3D surfaces and Lane markings.
- Text & number recognition: car license plate recognition, address or road number recognition, etc.
- Semantic information extraction using LIDAR and Camera
- Accurate estimation of vehicle position in the global coordinate system using particle filters.